Rogue Aerospace
NYU's First Hybrid Propulsion Rocket Team
Radio & Telemetry Systems Engineer

Project Overview
Rogue Aerospace is NYU Tandon's pioneering student-run hybrid propulsion rocket team, dedicated to designing, building, and launching high-performance rockets for competitive aerospace challenges. As part of this multidisciplinary team, we are developing NYU's first hybrid rocket to compete in the FAR-OUT Launch Competition, where teams push the boundaries of amateur rocketry through innovative propulsion systems and avionics design.
The FAR-OUT competition challenges teams to design rockets capable of achieving high altitudes while maintaining robust telemetry, tracking, and recovery systems. Our mission is to demonstrate technical excellence in hybrid propulsion, real-time data acquisition, and mission-critical communications under extreme flight conditions.
My Role: Radio & Telemetry Systems Engineer
System Architecture & Design
Defined and implemented the complete radio and telemetry systems architecture for the rocket, ensuring robust data transmission exceeding 10,000 feet range at 248 kbps across the 600-950 MHz frequency band. Designed the system to operate under strict power constraints and extreme environmental conditions including high G-forces, temperature fluctuations, and vibration.
Hardware Integration & Testing
Refurbished and validated critical communication modules including Adafruit RFM95W LoRa transceivers and Digi XBee Pro 900HP (XBP9B-DMST-002) modules for long-range telemetry. Integrated the SparkFun SAM-M10Q GPS module for high-precision flight tracking, enabling real-time position monitoring and post-flight trajectory analysis. Successfully completed range testing up to 1,000 feet in New York City's constrained testing environment.
Software Development
Developed dual-platform software systems: Python-based ground station application for real-time data collection, visualization, and mission monitoring; and C++ firmware for Arduino flight computer providing command/control, sensor integration, and telemetry transmission. Achieved the team's first successful bidirectional real-time communication system, capable of sending commands to the rocket and receiving live telemetry data.
PCB Design & Systems Integration
Contributing to custom PCB design using Altium Designer, integrating multiple sensor components including temperature and pressure sensors for environmental monitoring. Collaborating cross-functionally with airframe, payload, and propulsion teams to establish and meet technical requirements for FAR-OUT competition compliance, ensuring seamless interface between telemetry systems and other subsystems.
Technical Specifications
📻 Communication Systems
- Primary Telemetry: Digi XBee Pro 900HP (XBP9B-DMST-002)
- Secondary Link: Adafruit RFM95W LoRa (900 MHz)
- Frequency Range: 600-950 MHz
- Data Rate: Up to 248 kbps
- Range: >10,000 feet operational
- Protocol: Bidirectional command/telemetry
🛰️ Navigation & Tracking
- GPS Module: SparkFun SAM-M10Q
- Position Accuracy: ±2.5m CEP
- Update Rate: 1 Hz (configurable to 10 Hz)
- Altitude Tracking: Real-time MSL altitude
- Satellite Lock: Multi-constellation (GPS, GLONASS, Galileo)
🔌 Onboard Sensors (PCB)
- Temperature Sensor: Environmental monitoring
- Pressure Sensor: Altitude/environment tracking
- Interface: I²C communication bus
- PCB Design Tool: Altium Designer
- Simulation: Ansys Sherlock (thermal, vibration, shock)
💾 Software Stack
- Ground Station: Python 3.x (CustomTkinter GUI)
- Flight Computer: C++ (Arduino IDE)
- Data Format: CSV telemetry packets
- Map Integration: TkinterMapView with satellite imagery
- Serial Comm: PySerial (115200 baud)
System Architecture
The telemetry system follows a distributed architecture with three primary subsystems: onboard flight computer, wireless communication link, and ground station. Sensors feed data to the Arduino-based flight computer via I²C, which packages telemetry into CSV format and transmits through redundant radio links. The ground station receives, decodes, and visualizes data in real-time with map-based tracking and system health monitoring.
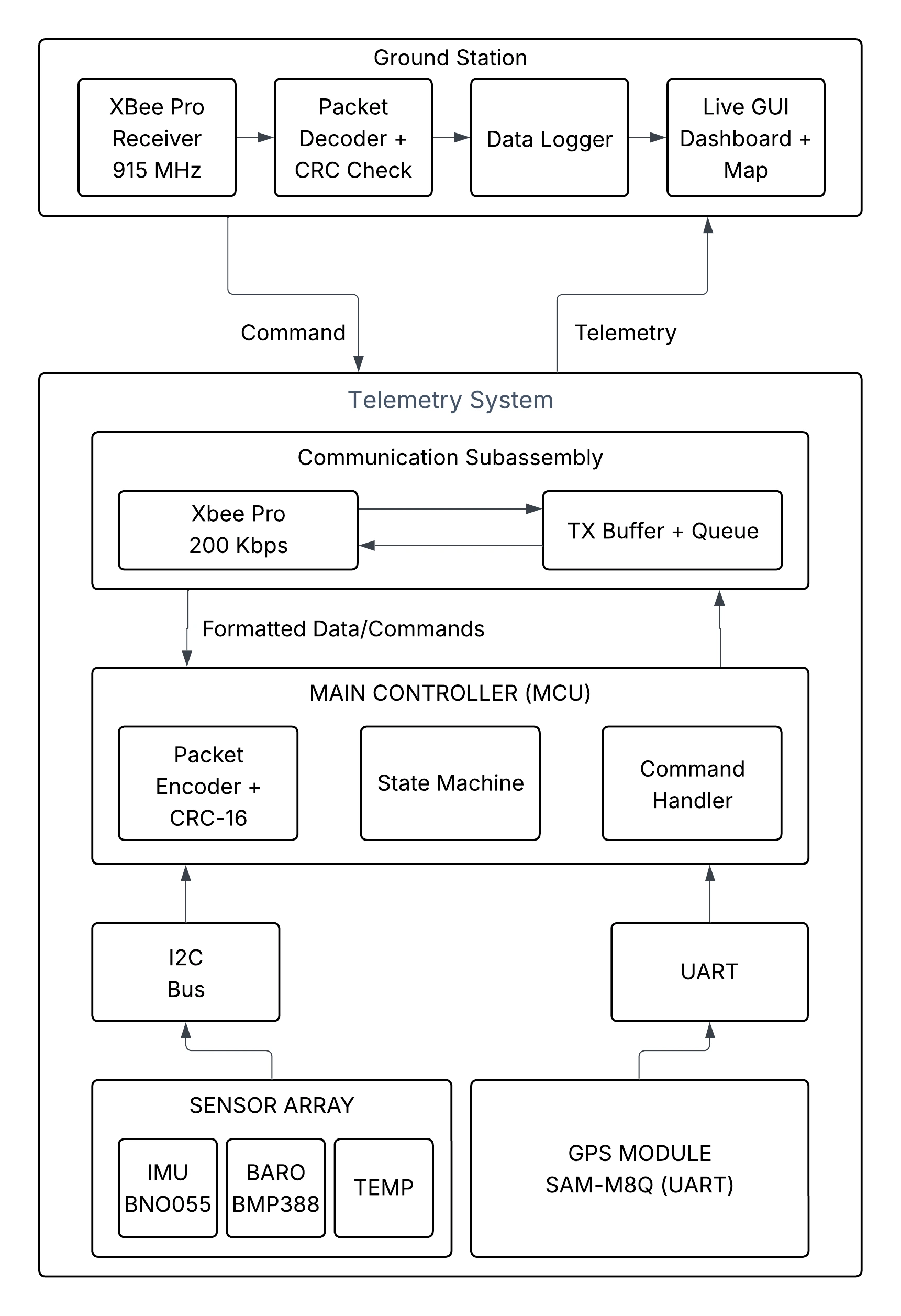
End-to-end telemetry and command system architecture
Software Implementation
Ground Station: GPS Tracking Application
Developed a modern Python-based ground station featuring real-time GPS tracking with animated map visualization, satellite imagery support, and comprehensive telemetry display. The application uses customtkinter for the UI, tkintermapview for map integration, and pyserial for Arduino communication.
Ground station interface with real-time rocket tracking
Key Features:
- ✅ Real-time GPS position plotting with smooth animation
- ✅ Dual map modes: Standard street view and satellite imagery
- ✅ Live telemetry display: Latitude, Longitude, Satellites, Altitude
- ✅ Serial port auto-detection and connection management
- ✅ Responsive UI with dark mode aesthetic
View Code Snippet: GPS Data Parsing
def read_gps_data(self):
"""
Read GPS data from Arduino.
Parses incoming serial data in CSV format: LAT,LON,SATS,ALT
"""
while self.running:
try:
if self.serial_port and self.serial_port.in_waiting:
line = self.serial_port.readline().decode('utf-8').strip()
# Parse CSV format: LAT,LON,SATS,ALT
parts = line.split(',')
if len(parts) == 4:
try:
lat = float(parts[0])
lon = float(parts[1])
sats = int(parts[2])
alt = float(parts[3])
# Only update if we have valid coordinates
if lat != 0.0 or lon != 0.0:
# Update UI
self.root.after(0, self.update_ui, lat, lon, sats, alt)
except ValueError:
pass
except Exception as e:
print(f"Error reading data: {e}")
time.sleep(0.05)Flight Computer: Arduino GPS Interface
The onboard flight computer runs optimized C++ firmware to interface with the SparkFun SAM-M10Q GPS module via I²C, extract position/velocity/time (PVT) data, and transmit formatted telemetry packets at 1 Hz. The system includes error handling for GPS initialization failures and maintains high reliability under flight conditions.
View Code Snippet: Arduino GPS Telemetry
#include <Wire.h>
#include <SparkFun_u-blox_GNSS_Arduino_Library.h>
SFE_UBLOX_GNSS myGNSS;
void setup() {
Serial.begin(115200);
Wire1.begin();
if (myGNSS.begin(Wire1) == false) {
Serial.println("ERROR: GPS not detected");
while (1);
}
myGNSS.setI2COutput(COM_TYPE_UBX);
}
void loop() {
if (myGNSS.getPVT()) {
// Send data in CSV format: LAT,LON,SATS,ALT
Serial.print(myGNSS.getLatitude() / 10000000.0, 7);
Serial.print(",");
Serial.print(myGNSS.getLongitude() / 10000000.0, 7);
Serial.print(",");
Serial.print(myGNSS.getSIV());
Serial.print(",");
Serial.println(myGNSS.getAltitude() / 1000.0, 2);
}
delay(1000); // Update every second
}Testing & Validation
Telemetry System Validation
Successfully demonstrated bidirectional communication with the ability to send commands to the flight computer and receive real-time telemetry data. System achieved reliable data transmission and reception under various test conditions.
Range Testing
Completed line-of-sight range testing up to 1,000 feet in New York City's challenging RF environment. Limited by available testing space rather than system capabilities, demonstrating robust performance in urban conditions with potential interference.
GPS Tracking Operational
GPS system achieved consistent satellite lock and accurate position reporting. Ground station successfully visualizes real-time rocket position with smooth animation and dual map modes (standard/satellite view).
Flight Data Collection
Status: Pending Launch
Full flight data collection awaits first launch event. System architecture and ground testing validate readiness for mission-critical data acquisition during powered flight, apogee, and recovery phases.
Project Gallery
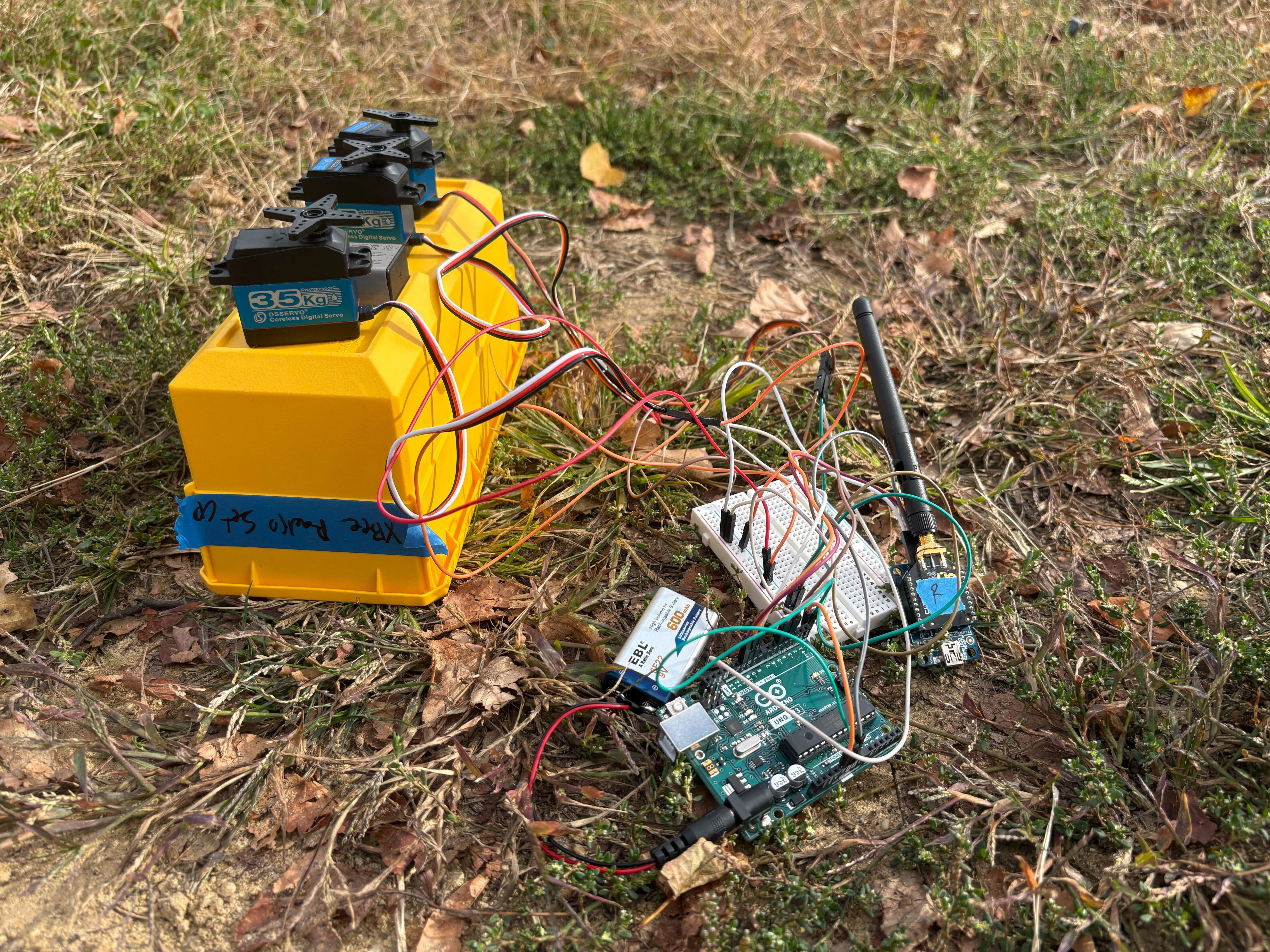
Telemetry system hardware integration and testing

Team integration and system assembly
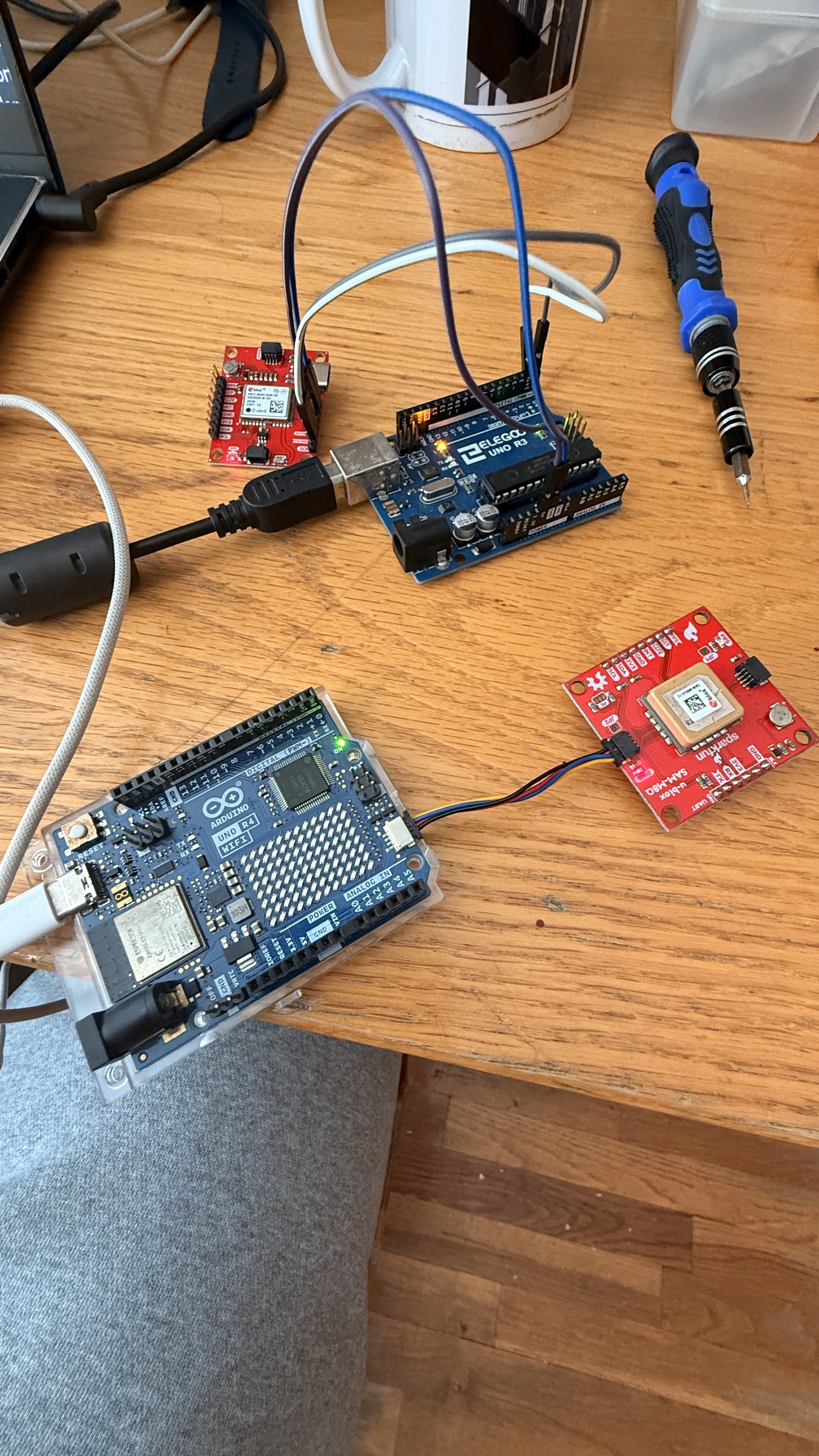
SparkFun SAM-M8Q GPS module integration
Impact & Skills Developed
🎯 Technical Excellence
Designed and implemented a complete telemetry system from concept to validation, demonstrating mastery of RF communication systems, embedded systems programming, PCB design, and system integration. Delivered NYU's first functional rocket telemetry architecture, establishing technical foundation for future missions.
🤝 Cross-Functional Leadership
Led cross-functional integration efforts with airframe, payload, and propulsion teams to establish and meet rigorous technical requirements for FAR-OUT competition compliance. Developed strong collaboration and communication skills while coordinating complex interfaces between multiple subsystems.
💡 Innovation & Problem-Solving
Overcame significant challenges including limited testing space in NYC, strict power/weight constraints, and harsh flight environment requirements. Implemented redundant communication architecture and robust error handling to ensure mission success under adverse conditions.